





Déformations des solides
Prérequis
- la dynamique du point présentée sur ce site,
- la dynamique du solide (pour les moments de force)
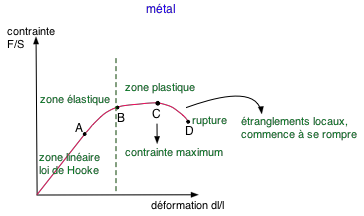
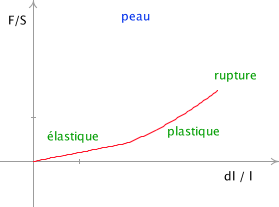
Les 3 domaines des déformations
Selon le matériau, la force exercée et le type de déformation, on peut avoir :
- déformation élastique,
- déformation plastique,
- rupture.
{kind=link}
{kind=link}
Les 3 types de déformations 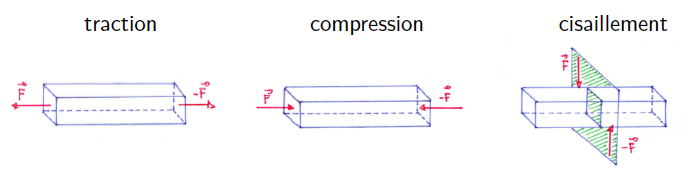
- traction (2 forces de même direction, sur la même droite, et de sens opposé, entrainant une augmentation de la longueur)
- compression (2 forces de même direction, sur la même droite, et de sens opposé, entrainant une diminution de la longueur)
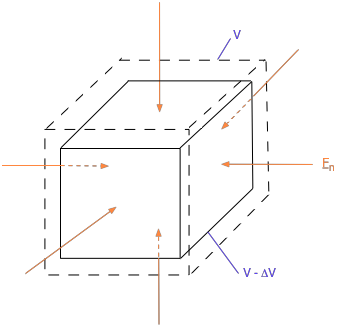
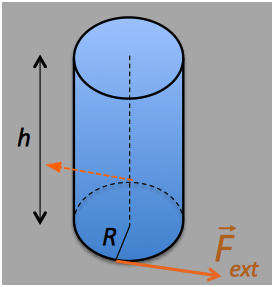
- dont compression en volume (dans les 3 directions) schéma,
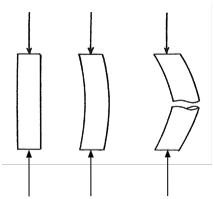
- flambage (force dans la direction de la longueur entrainant une déformation dans une autre direction, provoquant une flexion du corps puis la rupture) schéma
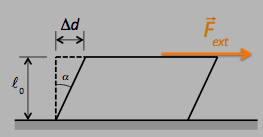
- cisaillement (2 forces tangentielles de même direction, sur des droites différentes, et de sens opposé)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quelques relations utiles
Loi de Hooke (déformations élastiques)
La loi de Hooke donne la relation entre
- la cause (la contrainte)
- et l'effet (la déformation).
| traction | \( \class{formule}{ ε_l = \dfrac{Δl}{l_0} = \dfrac{1}{E} . \dfrac{F}{S_0} }\) et dans le plan transversal, \( \class{formule}{ ε_t = - \dfrac{1}{ν} . ε_l }\) |
où E = module d'élasticité ou module de Young ν est le coefficient de Poisson |
| compression linéaire | \( \class{formule}{ \dfrac{Δl}{l_0} = \dfrac{-1}{K} . \dfrac{F}{S_0} }\) | où K = module de compressibilité |
| compression en volume | \( \class{formule}{ \dfrac{ΔV}{V_0} = \dfrac{-1}{B} . \dfrac{F}{S_0} }\) | où B = module de compressibilité en volume (Bulk, aussi noté Ep) schéma |
| cisaillement | \( \class{formule}{ α ≅ \dfrac{Δd}{l_0} = \dfrac{1}{η} . \dfrac{F}{S_0} }\) | où η = module de cisaillement ou
de rigidité (aussi noté G), α = l'angle de cisaillement schéma |
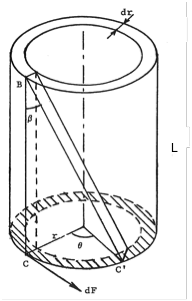
| torsion | \( \class{formule}{ θ = \dfrac{1}{η} . \dfrac{L}{r} . \dfrac{dF}{dS} }\) | où η = module de rigidité, θ = l'angle de torsion schéma |
{kind=link}
{kind=link}
Liens entre ces modules
K ≅ E pour des solides simples, mais K ≠ E pour des structures complexes (tissus biologiques)
\( \class{formule}{ B = \dfrac{E}{3 . (1 - 2 . ν)} }\)
\( \class{formule}{ η = \dfrac{E}{2 . (1 + ν)} }\)
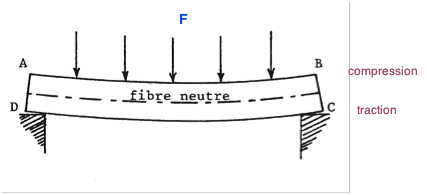
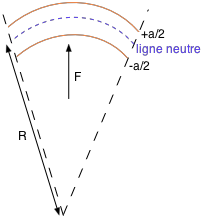
Flexion
\( \class{formule}{ M = E . \dfrac{J}{R} }\) (= formule de flexion) schéma
{kind=link}
- où J (parfois noté IS) = moment d'inertie de la section droite ou moment quadratique \( \class{formule}{ = \int_{-a/2}^{+a/2} x^2 . dS }\)
avec x = distance à la ligne neutre et a = épaisseur du solide, (à ne pas confondre avec le moment d'inertie I), - R = rayon de courbure
Torsion
Couple de forces de torsion ⇒ moment de torsion :
\( \class{formule}{ M = η . θ . \dfrac{I_p}{L} }\) où Ip est le moment polaire de la section = ∫ r2 . dS et vaut π . r4 / 2 pour une section circulaire
On peut la réécrire comme M = k . θ où k = coefficient de torsion
Pour un cylindre plein (p. ex. un fil), \( \class{formule}{ k = \dfrac{π . η . r^4}{2 . L} }\)