





Statique - biomécanique
Ceci est un complément du rappel de statique dans la dynamique du solide.
La base de la statique, c'est la seconde loi de Newton généralisée aux solides,
dans le cas particulier où a = 0 et α = 0 :
∑ £F = £0
∑ £M = £0
Ces deux équations sont appelées les conditions d'équilibre.
Quelques outils supplémentaires
Calcul du centre des forces d'un ensemble de forces parallèles ou antiparallèles (norme Fi, position du point d'application ri par rapport à un point quelconque) :
\( \class{formule}{ \class{symbol} {\vec{R}} = \dfrac{\sum F_i . \vec{r}_i }{ \sum F_i} + n . \vec{u}_t }\)
où n est un nombre quelconque et ut un vecteur unitaire dans la direction des forces.
Ce centre est donc en n'importe quel point d'une droite parallèle aux forces.
Intérêt
Pour équilibrer l'objet, il suffit d'appliquer en ce point une force supplémentaire égale à la résultante des forces mais de sens opposé, car alors les deux conditions d'équilibre de la statique (∑ £F = £0 et ∑ £M = £0) sont vérifiées.
Application au centre de gravité
\( \class{formule}{ \vec{R} = \dfrac{\int \vec{r} . g(\vec{r}) . ρ . dV}{F_G} }\) ( \( \class{formule} { = \dfrac{\sum \vec{r}_i . g(\vec{r}_i) . m_i}{F_G} }\) pour un ensemble discret)
Si l'objet est de petite taille (g cst) alors \( \class{formule}{ \vec{R} = \dfrac{\int \vec{r} . ρ . dV}{M} }\) ( \( \class{formule} { = \dfrac{\sum \vec{r}_i . m_i}{M} }\) pour un ensemble discret), et le centre de gravité se confond avec le centre de masse.
Equilibre
Un corps est à l'équilibre si son centre de gravité est à la verticale du point (ou de la zone) d'appui sur le sol.
On peut avoir un équilibre
- stable (lors d'un léger écart, le moment de P ramène l'objet à sa position d'équilibre),
- instable (le moment de P éloigne encore plus l'objet de sa position d'équilibre) ou
- indifférent (changement léger de la position d'équilibre).
Classes de leviers
Soient deux forces appliquées au levier (en supposant que le poids du levier soit négligeable) :
- £FR force de résistance à vaincre (souvent le poids),
- £FA force motrice appliquée (force musculaire en anatomie)
| classe |
position du point d'appui | forces (sauf R) vers le bas | forces (sauf R) vers le haut | schéma |
|---|---|---|---|---|
1 levier inter-appui |
centrale | les deux, de part et d'autre du point d'appui | / | 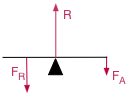 |
2 levier inter-résistant |
à une extrémité du levier | une, en un point intermédiaire du levier | une, à l'autre extrémité | 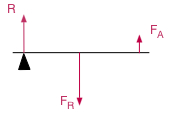 |
3 levier inter-effort |
à une extrémité du levier, attaché à celui-ci, ou avec le point d'appui au-dessus. |
une, à l'autre extrémité | une, en un point intermédiaire du levier | 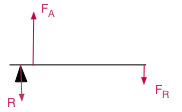 |
Avantage mécanique : \( \class{formule}{ \class{symbol} {AM} = \dfrac{F_R}{F_A} = \dfrac{x_A}{x_R} = \dfrac{v_A}{v_R} }\) (x = bras de levier, v = vitesse)
En utilisation normale,
- les classes 2 sont des multiplicateurs de force (AM > 1),
- les classes 3 sont des multiplicateurs de vitesse (AM < 1),
- tandis que les classes 1 peuvent fonctionner des deux façons.
Observez ici des schémas de 3 applications en anatomie (biomécanique).
{kind=link}
Dans la pratique, on devra tenir compte du poids du levier, il peut y avoir plus de forces, et celles-ci ne sont pas nécessairement perpendiculaires au levier.
Que cela ne vous perturbe pas; il suffit d'appliquer ∑ £F = £0 et ∑ £M = £0