





Cinématique
- prérequis
- description des mouvements
- forme des équations horaires pour certains types de mouvements :
- relation entre grandeurs linéaires et grandeurs angulaires
- aide à la résolution de problèmes de cinématique
Prérequis
- les mathématiques présentées sur ce site,
- les généralités présentées sur ce site (alphabet grec, notations, arrondis, incertitudes, préfixes, ...).
Description d'un mouvement quelconque
|
On décrit le mouvement d'un point par le vecteur position, le vecteur vitesse et le vecteur accélération. position : \( \class{formule}{ \class{symbol} { \vec{r} } }\) La vitesse moyenne \( \class{formule}{ \class{symbol} { \vec{v}_m } = \dfrac{Δ\vec{r}}{Δt} }\) |
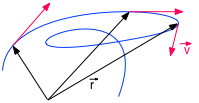 |
La description du mouvement nécessite de connaitre l'équation horaire de ce mouvement, c.à.d. r = f(t).
Cette équation vectorielle r = f(t) se décompose en 3 équations scalaires, 1 selon chacune des 3 dimensions de l'espace (on choisit 3 axes perpendiculaires X, Y, Z) :
rx = x = fx(t)
ry = y = fy(t)
rz = z = fz(t)
| Pour obtenir la vitesse, | Pour obtenir l'accélération, |
|---|---|
|
\( \class{formule}{ v_x = \dfrac{dx}{dt} }\) \( \class{formule}{ v_y = \dfrac{dy}{dt} }\) \( \class{formule}{ v_z = \dfrac{dz}{dt} }\) |
\( \class{formule}{ a_x = \dfrac{dv_x}{dt} }\) \( \class{formule}{ a_y = \dfrac{dv_y}{dt} }\) \( \class{formule}{ a_z = \dfrac{dv_z}{dt} }\) |
Les équations de
- x(t), y(t), z(t),
- vx(t), vy(t), vz(t),
- ax(t), ay(t), az(t)
sont appelées équations du mouvement.
Cas particulier des mouvements rectilignes
Lors d'un mouvement rectiligne, il suffit d'avoir l'équation horaire (équation scalaire) selon l'axe qui est dans la direction de ce mouvement.
Dans beaucoup de cours de physique, on commence par étudier ce type de mouvement.
Cas particulier des mouvements dans un plan
Lorsque le mouvement se fait dans un plan, on prend alors 2 axes perpendiculaires X et Y dans ce plan.
On a alors 2 équations, l'une selon l'axe X et l'autre selon l'axe Y, comme si on avait 2 mouvements rectilignes concomitants.
On appelle ce mouvement, un mouvement composé, mais il s'agit donc simplement d'un mouvement général dans un plan, pour lequel on doit décomposer l'équation vectorielle du mouvement en 2 équations scalaires, chacune similaire à celle d'un mouvement rectiligne.
On indiquera parfois l'équation de la trajectoire y(x), que l'on trouve à partir de x(t) et y(t) en éliminant le temps.
Cas particulier des mouvements circulaires
Pour un mouvement circulaire dans un plan,
position : θ
vitesse angulaire : \( \class{formule}{ \class{symbol} { ω} = \dfrac{dθ}{dt} }\)
accélération angulaire : \( \class{formule}{ \class{symbol} { α} = \dfrac{dω}{dt} }\)
La vitesse angulaire moyenne \( \class{formule}{ \class{symbol} {ω_m} = \dfrac{Δθ}{Δt} }\)
Forme des équations horaires dans certains cas particuliers
Cas particulier où l'accélération est constante
Pour un mouvement dans un plan, avec axes X,Y :
équations des composantes (scalaires) |
|
|---|---|
|
\( \class{formule}{ \vec{r} = \vec{r}_0 + \vec{v}_0~. t + \dfrac{\vec{a} . t^2}{2} }\) |
\( \class{formule}{ x = x_0 + v_{0x}~. t + \dfrac{a_x~. t^2}{2} }\) |
\( \class{formule}{ y = y_0 + v_{0y}~. t + \dfrac{a_y~. t^2}{2} }\) |
|
\( \class{formule}{ \vec{v} = \dfrac{d\vec{r}}{dt} = \vec{v}_0 + \vec{a} . t }\) |
\( \class{formule}{ v_x = v_{0x} + a_x~. t }\) |
\( \class{formule}{ v_y = v_{0y} + a_y~. t }\) |
|
\( \class{formule}{ \vec{a} = \dfrac{d\vec{v}}{dt} = \vec{cste} }\) |
\( \class{formule}{ a_x = cste_{x} }\) |
\( \class{formule}{ a_y = cste_{y} }\) |
Mouvements circulaires avec accélération angulaire constante
\( \class{formule}{ θ = θ_0 + ω_0~. t + \dfrac{α . t^2}{2} }\)
\( \class{formule}{ ω = \dfrac{dθ}{dt} = ω_0 + α . t }\)
\( \class{formule}{ α = \dfrac{dω}{dt} = cste }\)
Mouvements oscillatoires harmonique
Voir cette page.Relations entre grandeurs linéaires et grandeurs angulaires: 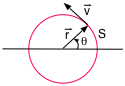
| S = θ . r |
|
v = ω . r |
tangent au cercle, dans le sens du mouvement |
ac = ω2 . r |
radial, vers le centre du cercle |
at = α . r |
tangent au cercle, dans le sens du mouvement si accélération, et opposé au mouvement si décélération |
\( \class{formule}{ \vec{a} = \vec{a}_c + \vec{a}_t }\) L'accélération tangentielle \( \class{formule}{ \class{symbol}{\vec{a}_t} }\) représente la variation de la grandeur du vecteur vitesse. |
 |
C'est la décomposition du vecteur accélération selon 2 axes perpendiculaires : l'un tangent à la trajectoire, l'autre perpendiculaire à la trajectoire.
Correspondance entre grandeurs linéaires et grandeurs angulaires
r -------> θ
v -------> ω
a -------> α