
Motorul este alimentat cu tensiunea nominală şi se înregistrează evoluţia vitezei pe durata opririi libere, determinată de deconectarea de la reţea (figura 11).
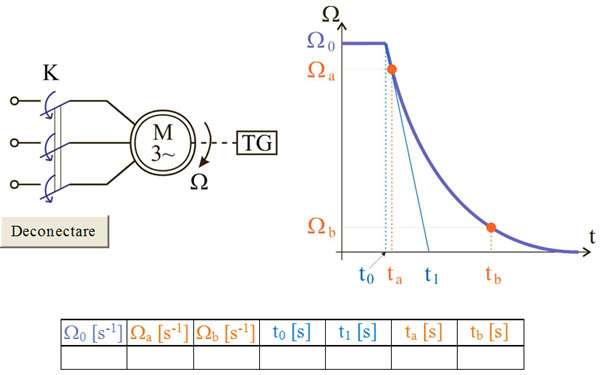
Figura 11 (animaţie)
Momentul de inerţie J. Din ecuaţia generală a mişcării în momentul deconectării motorului
![]() ,
,
rezultă
![]() .
.
Cuplul static în momentul deconectării Ms0 este datorat doar pierderile mecanice,
![]() ,
,
iar raportul dt/dW se determină trasând tangenta la curba vitezei în momentul deconectării, rezultând
![]() .
.
În final, se obţine
![]() .
.
Coeficientul de frecări vâscoase kv. Se consideră ecuaţia diferenţială a vitezei pe durata opririi libere
![]() ,
,
a cărei soluţie este
![]() .
.
Constanta de timp mecanică
![]() .
.
se obţine prin metoda tangentei, rezultând
![]() , respectiv
, respectiv ![]() .
.
Cuplul de frecări uscate mf. Se particularizează soluţia ecuaţiei diferenţiale de mai sus, pentru două valori ale vitezei (90%, respectiv 10% din W0), obţinându-se
 ,
,
de unde
![]() ,
,
respectiv
 .
.
În final rezultă
 .
.