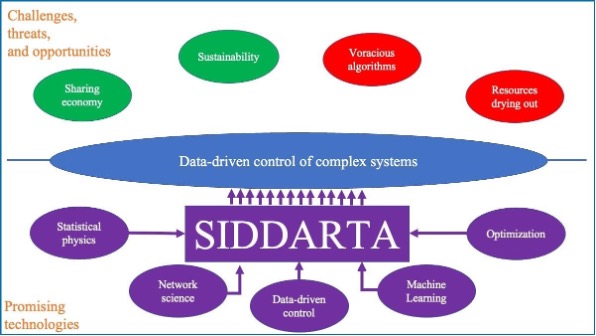
SIDDARTA is an innovative research project focused on sustainability in data-driven control of complex systems. It aims to balance resource frugality and performance in large-scale, interconnected systems by leveraging novel control paradigms, statistical physics, and machine learning. Our goal is to create more efficient, adaptable, and sustainable control methodologies.
SIDDARTA will introduce a new theoretical approach for data-driven control of complex interconnected systems, aiming at parsimony and sustainability, which are crucial challenges in many modern technological applications. Our new algorithms will address the massive paradigm shift towards data-driven control of complex systems, and propose sustainable alternatives to the current trend of evermore resource-voracious methods.