Pacman
La réalisation du robot s'est effectuée selon quatre grands axes.
Il n'est bien entendu pas possible de parler en détails de tout ce qui a été fait pour faire fonctionner notre
robot. Mais nous allons essayer de présenter ici les points les plus importants qu'il nous a fallu traiter.
Nous profitons également de l'occasion pour mettre à votre disposition la librairie
Eagle que nous avons créee pour les composants qui ont étés mis à notre disposition et qui ne se trouvaient pas
encore dessinés dans les librairies de base du logiciel.
|

|
1. La mécanique

2. L'électronique de puissance
Pour assurer la mobilité du robot, nous utilisons des moteurs à courant continu à commutation électronique.
Afin dobtenir une vitesse de déplacement maximale, nous utilisons deux moteurs Maxon brushless de 20W. De
tels moteurs ont lavantage de ne pas utiliser de dispositif mécanique de commutation par balais et collecteurs.
La disparition de ce mécanisme permet daugmenter sensiblement le rendement et la durée de vie des moteurs
à courant continu. Le seul bémol que lon peut attribuer à la commutation électronique est quelle nécessite
lutilisation dun dispositif de commande plus complexe pour en garantir le bon fonctionnement.
Après maintes réflexions, nous avons conclut que la commande de nos moteurs nécessitait l'utilisation d'un
boost et d'un onduleur.
Le boost permet d'élever les 12V fournit par les accumulateurs pour atteindre la tension nominale des moteurs
qui est de 24V.
L'onduleur s'occupe de la bonne commutation des tensions appliquées aux enroulements du moteurs ainsi que du
hachage de la tension qui leur est appliquée afin de commander la vitesse de rotation du rotor.
Le schéma bloc qui représente notre architecture se trouve repris à la Fig 2.1.
Fig. 2.1: Schéma bloc de l'architecture de puissance.
2.1 Conception du boost
Le but du boost est de fournir une tension continue de 24V à partir dune source de tension continue de 12V.
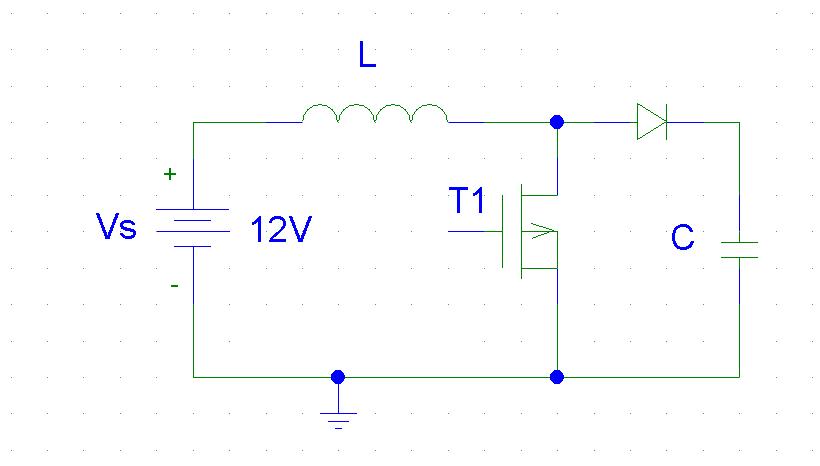
Ceci se fait en hachant le courant. Le schéma le plus simple que lon puisse utiliser est un hacheur parallèle
comme tel celui de la Fig. 2.2.
La tension moyenne aux bornes de la charge vaut alors : Uc = Us / (1 - alpha). Où alpha est la fraction
de la période de temps durant laquelle le transistor T1 conduit.
Un tel boost aurait suffit si notre moteur ne faisait que tourner. Malheureusement lutilisation des moteurs
ne se borne pas à lentraînement des roues, elle sétend également au freinage de celles-ci. Il nous faut donc
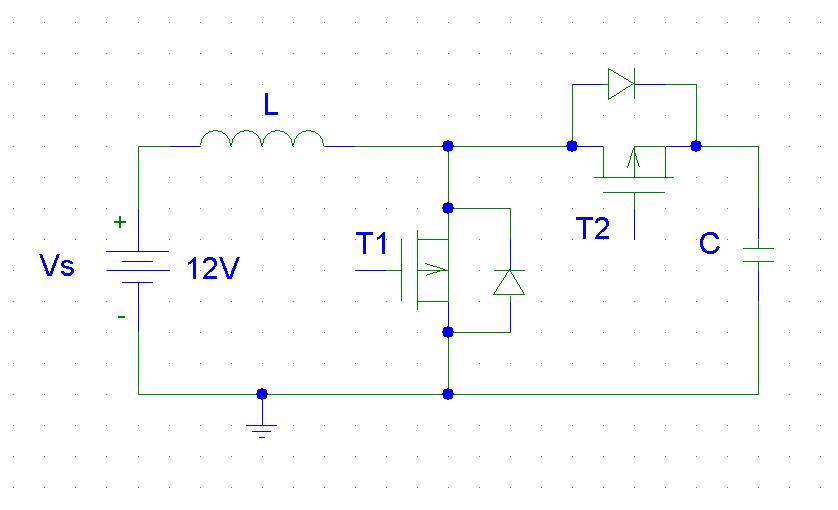
utiliser un schéma un peu plus compliqué afin de pouvoir supporter les conditions dutilisation. Ce schéma est
issu de lassociation dun hacheur série et dun hacheur parallèle, comme décrit à la Fig. 2.3.
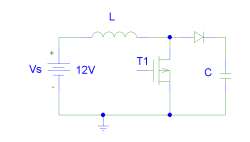
Fig. 2.2: Schéma d'un boost simple.
|
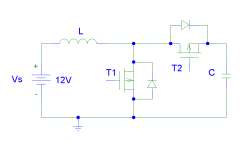
Fig. 2.3: Schéma d'un boost réversible en courant.
|
Ce nouveau boost est réversible en courant et nous permet de travailler dans deux cadrans:
en moteur ou en frein, ce qui est suffisant pour lutilisation que nous avons à en faire.
Le choix du sens de rotation du moteur, se fait par le biais de la commande de londuleur.
Il ne faut donc pas prévoir de réversibilité en tension du boost.
Ce circuit réversible en courant comporte en plus lavantage de sautoréguler, en effet si
la tension sur la charge est trop importante, celle-ci diminuera delle même en renvoyant du
courant vers la source.
La tension moyenne aux bornes de la charge est toujours Uc = Us / (1 - alpha).
Le transistor T1 conduit entre le temps t et le temps t+alpha*T, et le transistor T2 conduit entre t+alpha*T
et t+T. T étant la période de hachage de l'onduleur.
2.2 Réalisation de l'onduleur
Le but de londuleur est de permettre au moteur de fonctionner en assurant une commutation correcte
de lalimentation de ses enroulements.
2.2.1 Schéma électrique du circuit
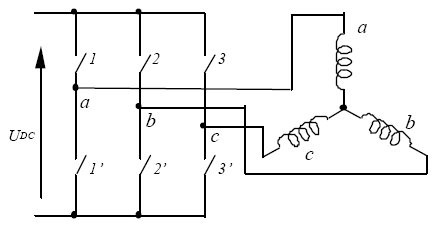
Le schéma de la figure 2.4 représente la connectique de base pour notre étude. Comme on peut le voir,
il sagit dune structure en pont triphasé. Pour répondre aux besoins du moteur en terme de commutations,
chaque intérupteur est constitué de la mise en parallèle dune diode et dun transistor MOS.
Lutilisation de transistors de type NMOS tant sur la partie supérieure que sur la partie inférieure
des bras de londuleur est rendue possible et même très aisée par lemploi de bootstrap driver
dont le fonctionnement et lemploi sont détaillés au point 2.3.1.
Les diodes placées en parallèle avec les transistors sont importantes. Sans
celles-ci, lorsque les transistors formant un bras de londuleur sont ouverts simultanéments,
aucun courant ne pourrait passer par ce bras. Louverture de ces
transistors risquerait de couper le courant dans la source de courant que forme
lenroulement du moteur commandé par ce bras. Cela naurait pour conséquence
que de mener à la destruction du moteur. La présence de la diode permet de regler
ce problème en laissant toujours un chemin libre au courant vers lalimentation.
Comme le moteur alimenté par ce circuit présente les caractéristiques dun
filtre (les enroulements sont essentiellement des selfs), il ne faut pas prévoir de
12
dispositif de lissage de la tension ou du courant de sortie. Pour ce qui est de son
alimentation, ce circuit sera connecté au boost décrit à la section 3. Ce dernier
dispose déjà des éléments de filtrage nécessaire à une alimentation correcte de
londuleur.
Le circuit de la figure 2.5 représente donc le schéma électrique de londuleur à réaliser.
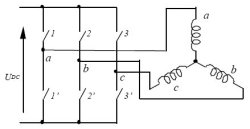
Fig. 2.4: Schéma conceptuel de l'onduleur.
|
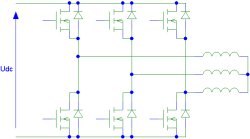
Fig. 2.5: Schéma électrique de l'onduleur.
|
2.2.2 Commande de londuleur
Sans entrer dans les détails de la logique de commande, il convient tout de même de préciser quelque peu la
commande des transistors qui composent londuleur.
La logique de commutation des enroulements est suivie par le FPGA du boitier PicFlex. Les signaux provenants
du boitier ont une tension maximale de 3,6V (logique TTL). Cette tension nest malheureusement pas suffisante pour commander
directement les bootstraps qui gèrent les transistors MOS (Voir point 2.3.1). Il faut donc prévoir un interface
qui soccupera de la mise à niveau des tensions pour le bon fonctionnement de lensemble.
Dans notre cas, ce rôle dinterface est rempli par des inverseurs à trigger de Schmitt (HEF40106). Lorsquon
les alimente à une tension de 5V, ceux-ci se comportent tout à fait normalement avec un signal de 3,6V damplitude.
Les sorties de ces inverseurs sont en full-swing. Le signal est donc restauré lors de cette inversion et le problème
de commande des bootstraps est ainsi réglé.
Il sagit tout de même de ne pas oublier que toutes les entrées du circuit sont, de ce fait, inversées. Il faudra
donc fournir un 1 logique (3,6V) pour ouvrir un transistors et un 0 logique (0V) pour le fermer. Mais cela ne pose
pas de problème majeur et simplémente facilement dans le FPGA.
2.3 Autres détails
2.3.1 Commande des transistors
Lutilisation de transistors de puissance demande de disposer de signaux qui soient suffisament puissants que pour
fournir les courants de pointe nécessaires à la charge et la décharge de la capacité grille.
De tels courants sont disponibles aiséments si on utilise un driver pour commander les transistors. Parmis le choix
de composants qui nous sont proposés, figure un circuit appellé bootstrap. Ce circuit intégré remplit plusieures
fonctionnalités intéressantes.
- Il peut fournir des courants importants pour la commande des grilles des transistors de puissances.
- Il peut atteindre une tension de commande élévée par le biais dune pompe de charge interne.
- Il permet la commande de deux transistors dont un peut être à une tension de source élévée et variable.
Le point ii est très utile car cette fonctionnalité permet de commander des transistors placés sur une tension
de source élevée. On peut donc commander un circuit de puissance fonctionnant à 24V avec une tension de commande
de 12V.
Le point iii présente un grand interêt. En effet, la tension qui commande le transistors est celle présente entre
la grille et la source. Lors de lutilisation en pont de tels transistors, celui de la partie supérieures de la
branche voit la tension de sa source varier avec la tension de sortie. La tension de commande appliquée à
la grille de ce dernier dépend alors de la tension de source et peut savérer difficile à générer.
Le bootstrap soccupe tout seul de régler la tension de grille du transistor supérieur et en assure la bonne
commutation. Il ny a donc plus de difficulté à utiliser deux NMOS pour les branches dun onduleur.
2.3.2 Délais de commutation
Lors de la mise en oeuvre de système délectronique de puissance, il convient toujours de vérifier les bonnes
commutations des interrupteurs utilisés. Cest-à-dire quil faut vérifier que lon ne court-circuite jamais une
source de tension ou quon ne déconnecte jamais une source de courant.
Si larchitecture présente ce risque, il faut prendre des précautions afin de sassurer quun tel accident ne se
produise pas. Le moyen le plus simple est dintroduire des retards de commutation.
Comme on peut le constater, la possibilité de court-circuiter des sources dalimentation se présente à plusieurs
endroits de notre installation de puissance. Pour éviter cela, on rajoute des délais à lenclenchement afin de
sassurer que le transistor qui doit souvrir ait bien eu le temps de finir sa commutation.
|
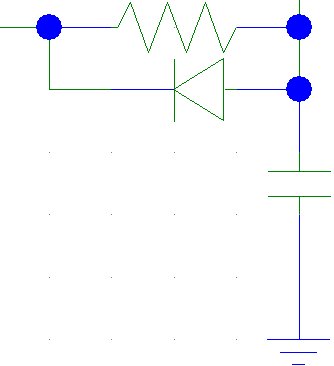
Un moyen simple pour implementer de tels délais est dutiliser un condensateur que lon charge et décharge lors
des transitions. Si on permet une décharge rapide du condensateur, louverture du transistor ne souffira daucun
délai. Il suffit ensuite de ralentir la charge de ce même condensateur pour retarder linstant de fermeture du
transistor.
La mise en parallèle dune résistance et dune diode permet cette fonctionnalité. Un schéma tel celui de la figure 2.5
rempli bien cette fonction.
Pour un passage de 1 à 0, le condensateur chargé se décharge au travers de la diode polarisée en sens passant. Cette
décharge se fait donc rapidement et aucun délai significatif nest ajouté.
Lors dun passage de 0 à 1, la diode est bloquée et le condensateur ne peut se charger quau travers de la résistance.
Le temps de charge impose donc un délai à lenclenchement.
|
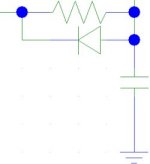
Fig. 2.6: Délai à lenclenchement.
|
Si vous voulez en savoir plus concernant notre étude de l'électronique de puissance dans le cadre du projet mécatronique, vous trouverez encore plus de détails dans le rapport que nous avons rendu.
3. Les capteurs
4. La programmation du PicFlex